Home > Articles Archives for Admin Page 20
The Raspberry Pi is the most popular single board computer on the market and finds its way in to robotics projects the world over. The RoboClaw can easily be controlled from a Raspberry Pi but the serial port harware must be configured propely first. This App Note covers how to configure the serial sort before connecting it to a RoboClaw.
The RoboClaw’s standard serial control mode is an easy method for control with just about any microcontroller. In this Application Note an Arduino will be used to control two motors in standard serial mode.
The RoboClaw is a rather sophisticated motor controller with a wide range of features and functionality. This Application Note will be a broad overview of the board, its features and tips on its usage.
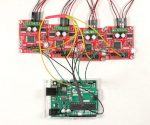
Some robotics projects will require the use of more than one motor controller at a time. RoboClaw supports this type of operation and it’s straightforward to configure and wire.
Some robotic projects make use of more than one motor controller. The RoboClaw is engineered to be used in this fashion with the use of a microcontroller like an Arduino.