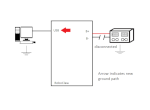
When using a motor controller improper grounding can cause damage to the motor controller and also to devices attached to it.
When using a motor controller improper grounding can cause damage to the motor controller and also to devices attached to it.
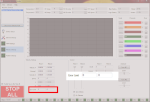
The RoboClaw and MCP motor controllers have a new safety feature based around errors in the PID system. This application note takes a look at what it is and how to use it.

In this Customer Project article we take a look at a robot build meant to tackle the great outdoors.

A user on Hackaday has developed a low-cost alternative to the Turtlebot platform for use with the Robot Operating System. In this customer project article we take a look at the details of the project.
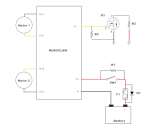
There are several hardware and software precautions that must be taken to prevent damage to a RoboClaw or MCP motor controller. This application note covers the details of each of them.