
The Arduino is an easy to use microcontroller for interfacing with the RoboClaw motor controller. It comes with a wide range of easy to use libraries out of the box. BasicMicro also has an easy to use library for the Arduino.
The Arduino is an easy to use microcontroller for interfacing with the RoboClaw motor controller. It comes with a wide range of easy to use libraries out of the box. BasicMicro also has an easy to use library for the Arduino.
Multiple RoboClaws can be used together for projects requiring more than one motor controller. This Application Note demonstrates the control of 4 RoboClaws by a Raspbery Pi using the packet serial control mode of the RoboClaw.
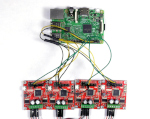
Multiple RoboClaw’s can be used simultaneously when controlled by a microcontroller or computer. The Raspberry Pi is one suitable choice. This Application Note covers using a Raspberry Pi 3 to control 4 RoboClaws in standard serial mode.

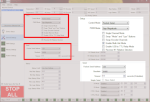
This Application Note details how to operate the RoboClaw in standard serial mode using a Raspberry Pi 3. In standard serial mode the RoboClaw accepts single byte commands that control the operation of both motor channels.

In this Application Note a Raspberry Pi is used to control a RoboClaw in packet serial mode. In packet serial mode the Raspberry Pi can send commands to the RoboClaw as well as read data from the it.