The RoboClaw uses a mathematical concept called a Cyclic Redundancy Check to ensure data transmitted to and from it hasn’t been corrupted in transit. In this Application Note we’ll cover the in and outs of the CRC.
The RoboClaw uses a mathematical concept called a Cyclic Redundancy Check to ensure data transmitted to and from it hasn’t been corrupted in transit. In this Application Note we’ll cover the in and outs of the CRC.
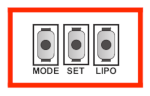
The RoboClaw is designed with ease of use in mind. One example of this easy to use functionality is the ability to configure the modes and mode options directly from the RoboClaw board without the use of a computer.

Encoders are a vital part of control systems in robotics. In this article we’ll be looking at the how, what and why surrounding encoders.

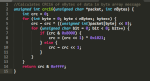
The Arduino is one of the most popular microcontroller platforms around due to its ease of use and large supportive community of users. Today we will look at simple example of using the Arduino to control a RoboClaw.
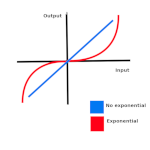
The RoboClaw allows for simple and direct control with an RC system, yet there are options that allow for more fine grained control of your system. In this article we’ll be discussing these point by point.