Motion Studio installs from a single signed setup.exe from the BasicMicro downloads page, with no separate USB driver required on Windows 10 or 11. This guide covers installing the software and connecting a RoboClaw or MCP controller for the first time.
Introduction to Motion Studio
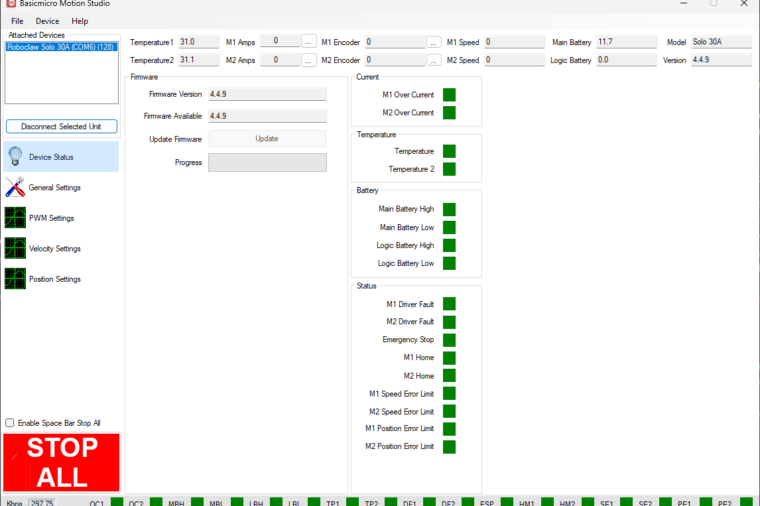
An introduction to BasicMicro Motion Studio, the Windows application used to configure, test and tune RoboClaw and MCP series motor controllers. The first article in a series, covering the layout and the most common operations.
General Settings in Motion Studio
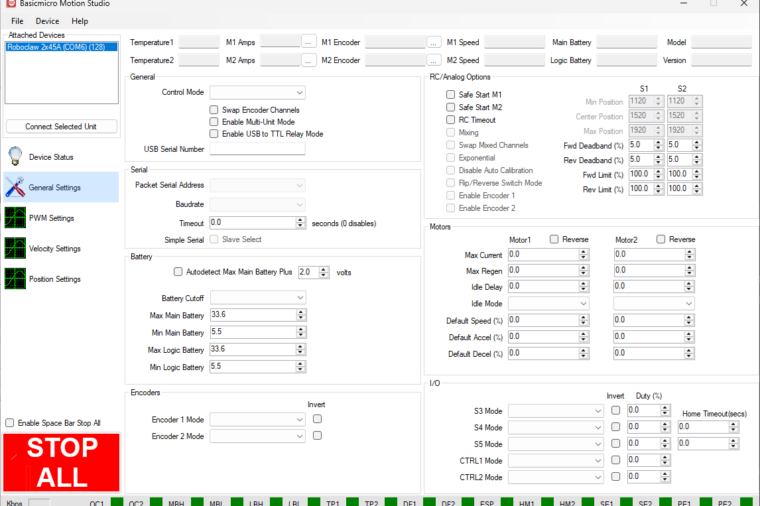
BasicMicro Motion Studio can be used to configure every aspect of the RoboClaw motor controller, and most settings live on the General Settings screen. This guide breaks down all seven panes, General, Serial, Battery, Encoders, RC/Analog Options, Motors, and I/O, and explains what every setting does.

PWM Settings in Motion Studio
This App Note is part of a series on the usage and features of Motion Studio. This article covers the PWM Settings window that is used for motor and encoder testing.

Velocity Settings in Motion Studio
The Velocity Settings window in Motion Studio is where motors and encoder are tested. It’s also the location where tuning of motor and encoder combinations is carried out. This Application Note details all of the functionality within this section of Motion Studio.

Position Settings in Motion Studio
The Position Settings window of Motion Studio is where the control loop for positon control is tuned and tested. This Application Note covers the controls and settings of this widow and what they are used for.

Saving and Restoring RoboClaw Configurations
A RoboClaw’s configuration can be saved and loaded from a file. This Application Note looks at how to do this.

Graphing in Motion Studio
Motion Studio feature the ability to graph different aspects of a motor, encoder and the controller against each other in real time. This Application Note covers the use of this feature.

Auto Tuning with Motion Studio
In systems with a PID controller, the proportional, integral, and derivative values must be set properly for the controller to work well. Motion Studio can tune these values automatically for a motor and encoder combination. This guide covers auto tuning velocity and position control and fine tuning the results.
Understanding Acceleration and Deceleration Values
The acceleration and deceleration values used in Motion Studio and the software libraries can be understood as raw values, percentages, and time. This guide explains the two unit systems, duty units per second for duty commands and QPPS per second for speed commands, and how to convert between the different views.