Motion Studio installs from a single signed setup.exe from the BasicMicro downloads page, with no separate USB driver required on Windows 10 or 11. This guide covers installing the software and connecting a RoboClaw or MCP controller for the first time.

Solo Quick Start Guide
This is a guide to get you up and running quickly with the Solo motor controller.

Case-less Solo Quick Start
How to mount and run the RoboClaw Solo without its case, wire a motor and encoder, and configure packet serial control with Motion Studio.

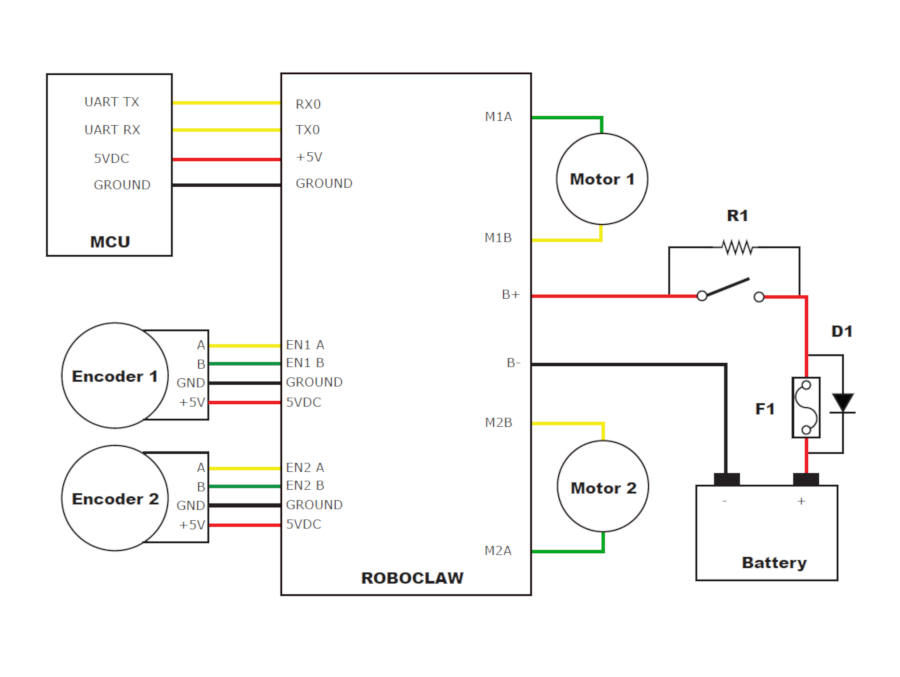
Dual Channel RoboClaw Quick Start Guide
Get up and running quickly with any dual channel RoboClaw: wire the motors, encoders, and power, test in Motion Studio, and set the control mode.
Installing BasicMicro Libraries and Downloading Code from GitHub
How to install BasicMicro’s official libraries through the Arduino IDE Library Manager and pip, and how to download or clone library and example code repositories from GitHub.

RC Mode Configuration with Buttons
In this Application Note the RC mode of RoboClaw is configured with the onboard buttons avoiding the need to use Motion Studio.

Saving and Restoring RoboClaw Configurations
A RoboClaw’s configuration can be saved and loaded from a file. This Application Note looks at how to do this.

Motor Controller Selection
The three motor specifications that determine the right motor controller: voltage, running current, and stall current, plus how to estimate stall current and size a RoboClaw around it.
Motor Controller Protection: Diodes, Clamps, and Pre-Charge Resistors
Motors generate a regenerative voltage spike when they stop or slow quickly, which can damage a motor controller. This guide covers how to protect a controller with a bypass diode, a voltage clamp, a pre-charge resistor, and the maximum voltage setting.

Auto Tuning with Motion Studio
In systems with a PID controller the proportional, integral and derivative values must be set properly for the controller to operate well. Motion Studio features software to automatically tune these values for a motor and encoder combination. In this Application Note we’ll look at how to use it and fine tune the results.