
This Application Note looks at a simple first script using the MCL language for MCP motor controllers.

Calibrating Motor Controller Voltage Readings
In some cases the voltage read by a motor controller will need to be calibrated to match the actual power supply voltage. This Application Note covers the process of doing so.

Understanding Acceleration and Deceleration Values
The values used for acceleration and deceleration in Motion Studio and the available software libraries can be understood in several terms. The App Note looks at how to make sense of the various ways they can be interpreted.

Motor Controller Selection
The three motor specifications that determine the right motor controller: voltage, running current, and stall current, plus how to estimate stall current and size a RoboClaw around it.

Ground Path Issues
When using a motor controller improper grounding can cause damage to the motor controller and also to devices attached to it.

Velocity and Position Error Limits
The RoboClaw and MCP motor controllers have a new safety feature based around errors in the PID system. This application note takes a look at what it is and how to use it.
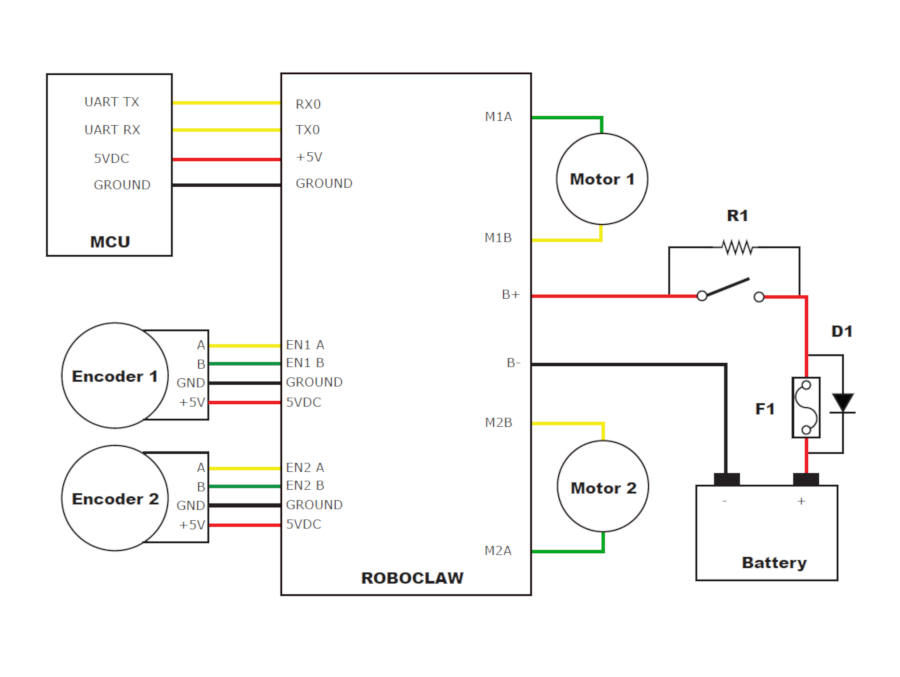
Motor Controller Protection: Diodes, Clamps, and Pre-Charge Resistors
Motors generate a regenerative voltage spike when they stop or slow quickly, which can damage a motor controller. This guide covers how to protect a controller with a bypass diode, a voltage clamp, a pre-charge resistor, and the maximum voltage setting.

Understanding Motor Specifications
Motor specifications — voltage, current, speed, torque, and power — describe how a motor behaves and determine the battery and motor controller you need. This guide explains what each specification means and how to use the stall current to size a controller.

PID Control and Motor Controllers
Motor controller like the RoboClaw used feedback from sensors like encoders to maintain the speed and position of motors. Internally, a system called a PID controller is used to maintain these values at their given setpoints. In this App Note we’ll be looking at the what, why and how of a PID controller.

Selecting the Proper Battery
How to choose a battery for a robotics project: compare LiPO, LiFePO4, and lead acid chemistries by voltage, capacity, and C rating to match your robot’s power and run time needs.