Introduction
In some cases the voltage measured by a RoboClaw or MCP motor controller varies from the actual measured voltage of the power supply. This difference can be compensated for in Motion Studio. This Application Note covers the process of calibrating the voltage read by the motor controller.
Materials
(1) Roboclaw or MCP motor controller
(1) power supply for motor controller
(1) multimeter
(1) computer with Motion Studio installed
(1) micro USB cable
(1) power supply for motor controller
(1) multimeter
(1) computer with Motion Studio installed
(1) micro USB cable
Let’s Get Started
1. Wire the RoboClaw to a power source. See this Application Note and follow it to step 2.
2. Use a multimeter to measure the power supply’s voltage at the power terminals of the motor controller. Makes sure that the multimeter is set to read DC voltage before applying the probes to the battery terminals. Write down the voltage for reference in the following steps.
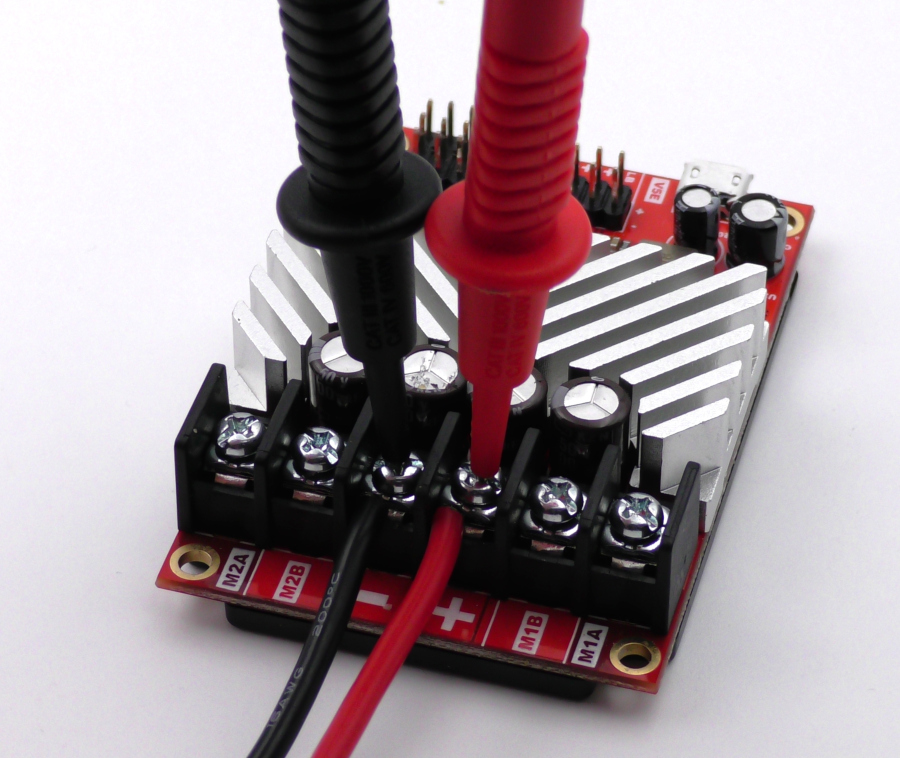
Figure 1: Multimeter probes on the power terminals of a RoboClaw motor controller.

Figure 2: Voltage reading on a multimeter.
3. Connect the powered motor controller to a computer with a micro USB cable. Open Motion Studio and connect the motor controller by clicking “Connect Selected Unit”. In the upper right-hand corner of the application note the voltage of the main battery and write it down.
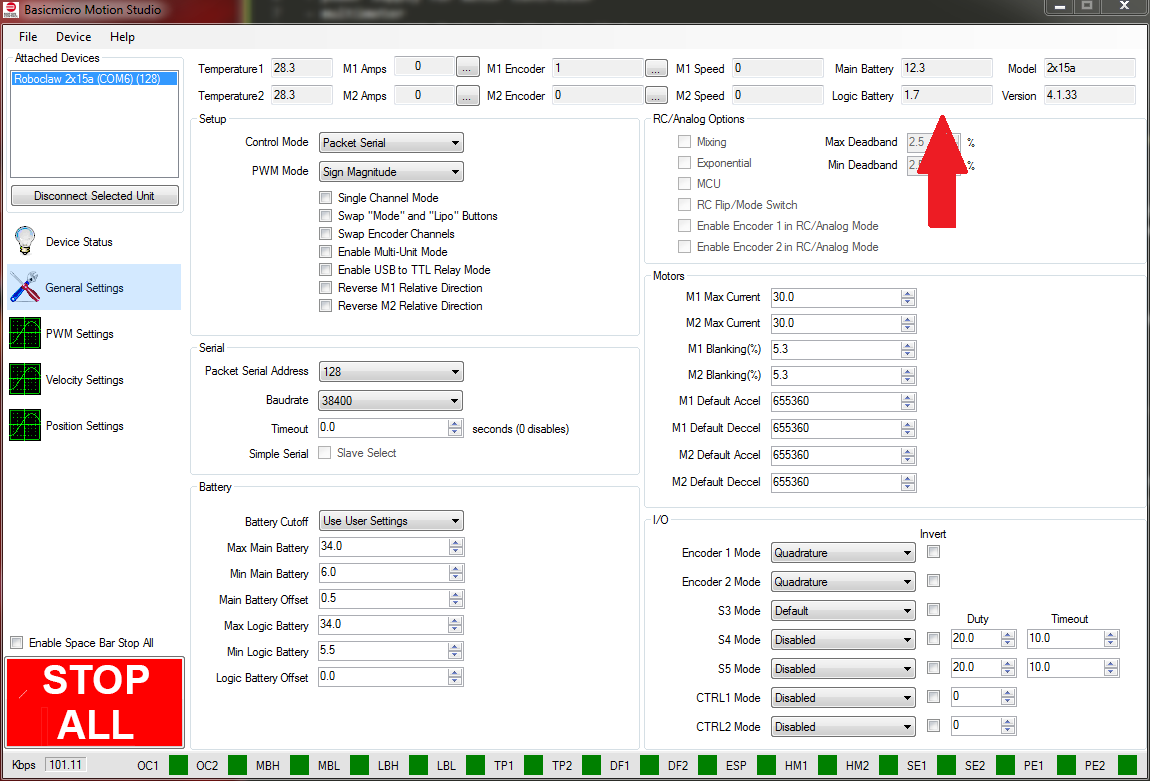
Figure 3: The main battery voltage as measured by the motor controller and displayed in Motion Studio.
4. Subtract the voltage indicated in Motion Studio from the voltage read by the multimeter. This value will be used in the next step.
5. Use the value found in the previous step to set the voltage offset. Click on “General Settings” on the left-hand side of the application. Now locate the pane labeled “Battery”. In the box labeled “Main Battery Offset” enter the value found in the previous step. The value can be positive or negative depending on the voltages found earlier. If the actual voltage is higher that the one read by Motion Studio the offset will be positive, in the opposite case it will be negative.
This same process can be carried out for a logic battery if one is being used.
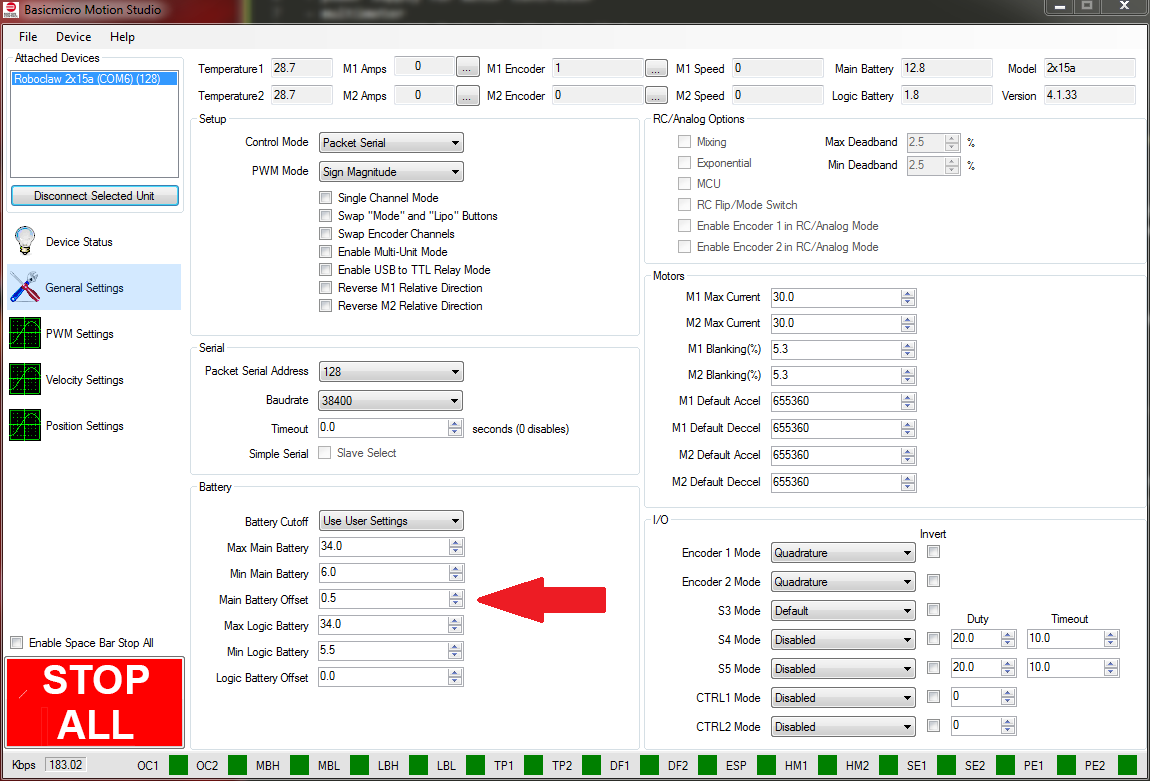
Figure 4: Location of the voltage offset setting in Motion Studio.