Home > Articles Getting Started Page 5
Wire termination can be a source of problems or a source of reliability depending on how it’s done. There are several ways to properly terminated wires used with BasicMicro motor controllers. We’ll be looking at both the wrong and right ways to prepare wiring in this Application Note.
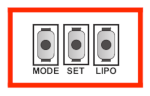
The RoboClaw is designed with ease of use in mind. One example of this easy to use functionality is the ability to configure the modes and mode options directly from the RoboClaw board without the use of a computer.
Before you can begin using your RoboClaw, you’ll first need to install the RoboClaw driver and Basicmicro Motion Studio on your computer. Once you’ve completed the software installation you’ll be free to uniquely configure your RoboClaw for you particular needs.
The RoboClaw motor controller features several types of protection to ensure the safety of the hardware in your system. On of the most important of these features is the battery cutoff protection. This features ensures that your system’s batteries are protected from both under and over voltage conditions.
Today we will be covering how to configure and wire the RoboClaw motor controller for one of the most common control and drive schemes in robotics. In this tutorial we will show how the RoboClaw can be used in a differential drive robot controlled via an RC radio system. This may be the final configuration for your robot or a step in testing your hardware, either way you’ll see that configuring the RoboClaw takes little time and effort.