A new feature in Motion Studio and both the RoboClaw and MCP firmware is the addition of velocity and postion error limits. These can be used to stop one or both motors in the event that the error in the PID control loop exceeds a certain value. The velocity and position error limits are a safeguard used to stop motors in the event that the velocity or position error exceeds a user set value. Several things can cause this to occur and the safest thing to do in the event of a problem is stop both motors.
Setting the Velocity Error Limit
To set up the velocity error limit begin by opening Motion Studio and connecting the motor controller. Next click on Velocity Settings on the left-hand side of the application. Locate the Velocity Settings pane in the lower left-hand side of the window. In the text box label “Error Limit” enter the value you would like to set. The value is measure in encoder counts per second. Finally, save the settings to the board.
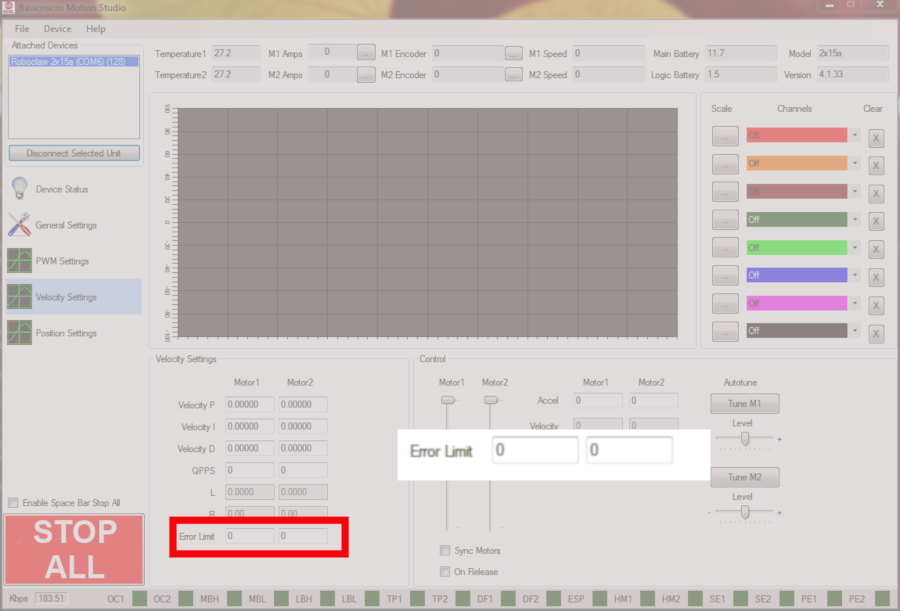
Figure 1: Location of error limit setting in the Velocity Settings window.
Setting the Position Error Limit
To set up the position error limit begin by opening Motion Studio and connecting the motor controller. Next click on Position Settings on the left-hand side of the application. Locate the Position Settings pane in the lower left-hand side of the window. In the text box label “Error Limit” enter the value you would like to set. The value is measure in encoder counts. Finally, save the settings to the board.
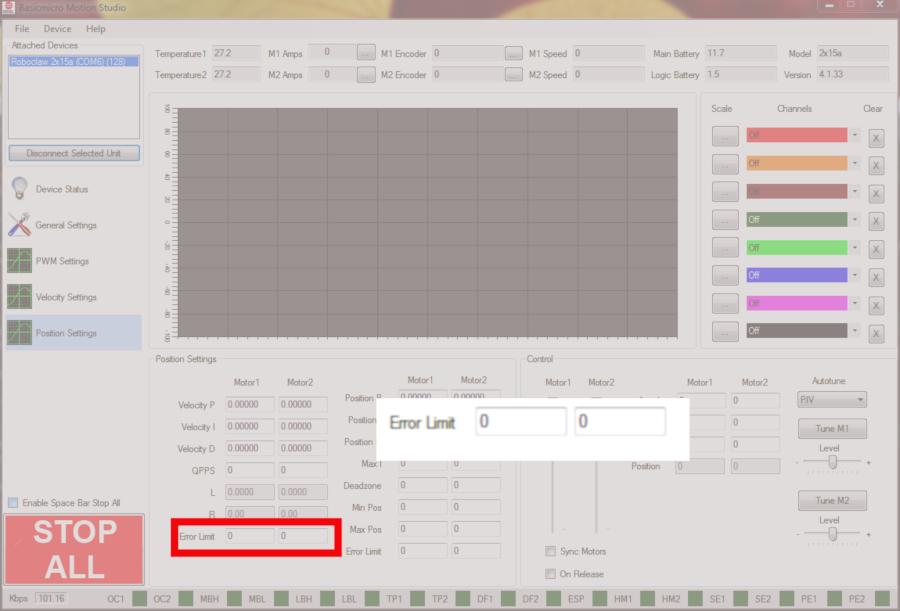
Figure 2: Location of error limit setting in the Position Settings window.