
Figure 1: The robotic platform being operated via radio control.
A robot builder with a YouTube channel named “EraserMice Labs” has posted the details of a robotic platform build for the world to see. The platform looks like a simple box but it’s intended use is as a platform to carry one or two entertainers duing a performance. The builder states that the plywood platform will support up to 400 pounds and demonstrates the platform driving around with him on it without any strain on the drivetrain.
The plaform’s drivetrain consists of a pair of 12V 128rpm HD gear motors from ServoCity. The motors are mounted towards the center of the platform and there are casters on each corner to aid in turning and to balance out the drivetrain. Actobotics channel supports the driveshaft of each motor and each motors is tied to a standard scooter wheel. The motors are controlled by a RoboClaw 2x30A motor controller in RC mode. To utilize the RC mode of the RoboClaw a Hitec Minima 6T receiver to connected to the RoboClaw with servo cables. A HiTec Optic 5 radio bound to the Minima receiver is used to drive the robotic platform around.
We thank the platform’s builder for posting the details of his build and for choosing to use a RoboClaw motor controller. The builder’s video can be found below as well as on YouTube.
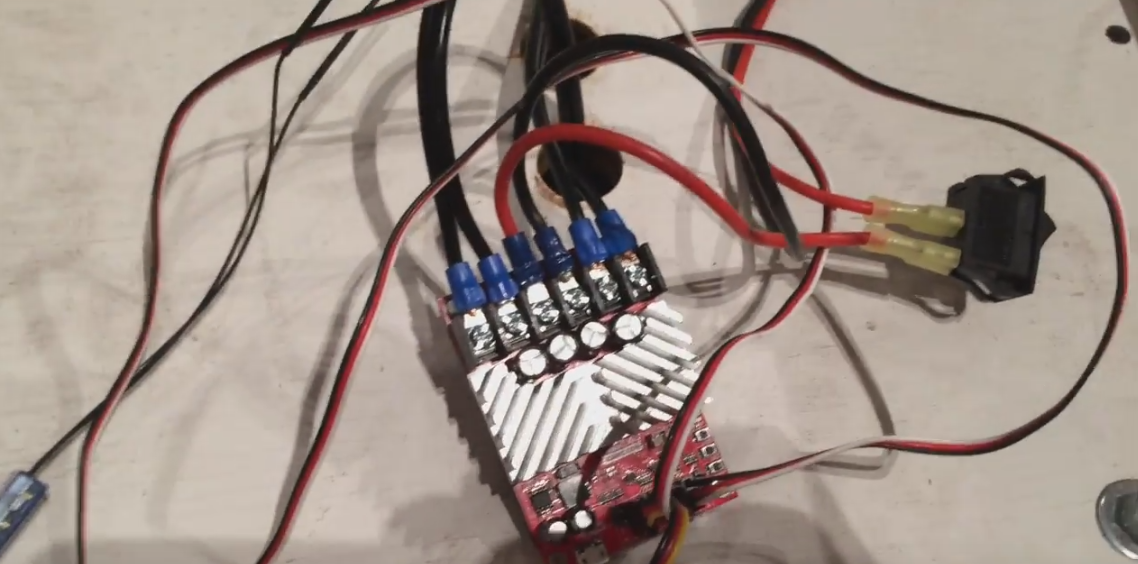
Figure 2: The RoboClaw 2x30A motor controller used in the project.