The G-Rover is a robotic video and camera platform designed and built by the team at Grey Goose Graphics. The G-Rover is built on a 4 wheeled skid-steering chassis and the drive train is controlled by a RoboClaw 60A motor controller.
For remote control the G-Rover uses a 2.4 GHz radio control system utilizing the RC control mode of the RoboClaw motor controller. A live video feed from the robot is provided by an on-board video camera and a first person video transmitter. The G-Rover has the capability to carry any camera with a 1/4-20 fitting as well as the ability to carry larger camera payloads. They plan to use the bot for capturing 360 degree video where no operator is visible in the view, Google Street View images and other projects where a remote camera is needed.
The G-Rover is an example of one of the many types of projects that the RoboClaw motor controller is capable of creating. We congratulate the team at Grey Goose Graphics on their cool and successful project.
The full details of the G-Rover can be seen here.
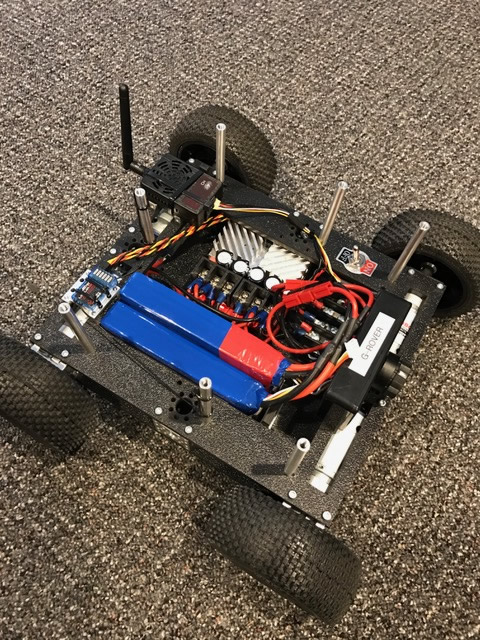
Figure 1: An image of the G-Rover at rest. The RoboClaw 60A motor controller is visible as the board with the heatsink on it.