Introduction
The RoboClaw has a wide range of features and capabilities that allows you to create a variety of robotics projects. This Application Note features an overview of the RoboClaw board and guidelines on using it successfully.
Board Layout
*The following Application Note applies to all RoboClaw models, however all of the images contained here are of the RoboClaw 2x7A.
Power terminals
The RoboClaw has two terminals for connecting your choice of a power source. The terminals are labeled (+) and (-) for positive and negative respectively. Be careful to not reverse the connections as damage to the board will occur.
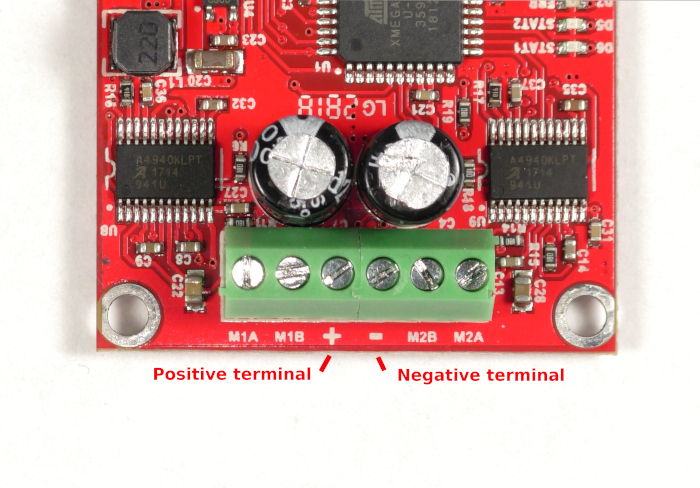
Figure 1: RoboClaw’s power terminals.
Motor Terminals
On either side of the power connections are the motor terminals. They are labeled M1A/M1B and M2A/M2B, each pair of terminals represents a single channel for a motor. The direction each motor turns is determined by which way the motor wires are connected to these terminals. If you want each motor to operate the same, wire both motors in the same order on each set of terminals. If the motors do not turn the direction you want when testing you can reverse the order of the wires at the terminals.
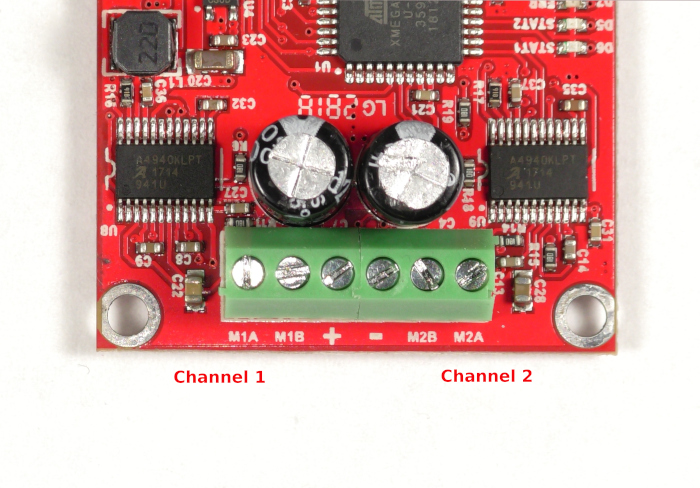
Figure 2: RoboClaw’s motor terminals.
Pin Headers
The pin headers on the RoboClaw are used for a variety of functions and are labeled accordingly. The headers are 0.1″ pitch. All 0.1″ jumper wires and standard RC servo connectors can be used to connect to them.
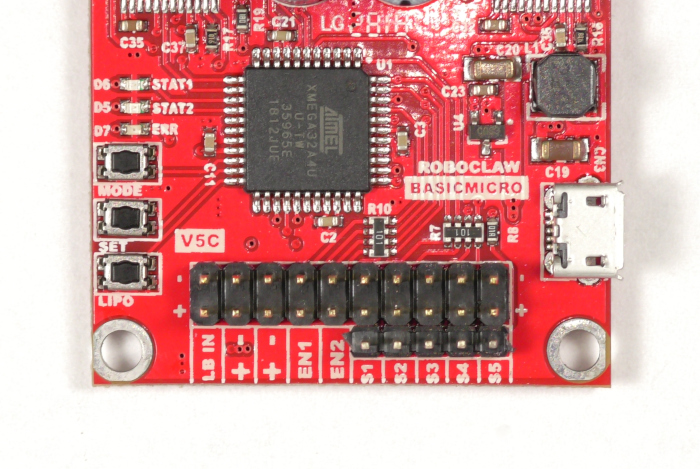
Figure 3: Pin headers on the RoboClaw.
LB In
This pair of pins is for using a separate battery to power the RoboClaw’s internal logic circuitry. When driving heavy loads the RoboClaw can experience brownouts when the voltage sags below 5VDC leading to the RoboClaw operating improperly. Note that the header is polarized with the pin closest to the board edge as the positive pin.
Encoder Power
Next to the LB battery input are a pair of headers used to power encoders. They are labeled with (+) and (-). This header provides 5VDC for two encoder channels, one per header. Notes that these headers are polarized with the positive pin being the one closest to the board edge.
ENC1 and ENC2
The two headers labeled ENC1 and ENC are the encoder input headers. Each header is used for a single encoder with inputs for both the A and B channel of a quadrature encoder. When using potentiometers as encoders the pin closest to the board edge is used as the input. The order you wire the encoder channels does matter. If the encoder channels are wired backwards they will not indicate the direction and counts properly. Proper operation of the encoder inputs can be checked in Motion Studio.
S1 and S2
Headers S1 and S2 are used for a variety of purposes. In RC and Analog mode these headers act as inputs from radio receivers, potentiometers and joysticks. In packet and standard serial mode these pins act as RX and TX channels for serial communications as well as slave select inputs. There are three pins on each of these headers. The pin closest to the board’s edge is the signal pin, the middle pin is positive and the pin on the inside edge of the board is the negative pin.
S3 through S5
These pin headers can be used for a handful of functions different from those of S1 and S2. S3 can be used as a flip switch to change motor directions in RC mode. These headers are also used for voltage clamping functionality, limit switches, home switches and e-stops.
Status LEDs
There are three small LEDS labeled STAT1, STAT2 and ERR. These are used to indicate the status of the RoboClaw. In normal operation the STAT1 led blink rapidly when connected to Motion Studio. Also the STAT1 and STAT2 leds will light up and stay lit when a motor channel is active. When the RoboClaw encounters problems these LEDs are also used to indicate a variety of warnings and fault conditions. See this App Note or the manual for further information.
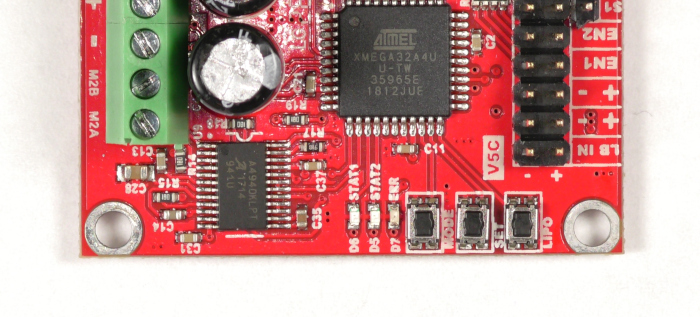
Figure 4: RoboClaw’s status LEDs.
Buttons
There are three buttons labeled MODE, SET and LiPO. These buttons can be used to set the mode of the RoboClaw as well as other related settings. See this App Note or the manual for information about using these buttons.
Micro USB Port
On the edge of the board there is a micro USB connector. It is used when configuring RoboClaw with Motion Studio. When RoboClaw is connected via USB it can send commands and operate both motor channels. Please note that the RoboClaw cannot be powered via the USB port and always requires that a power source be connected to the power terminals.
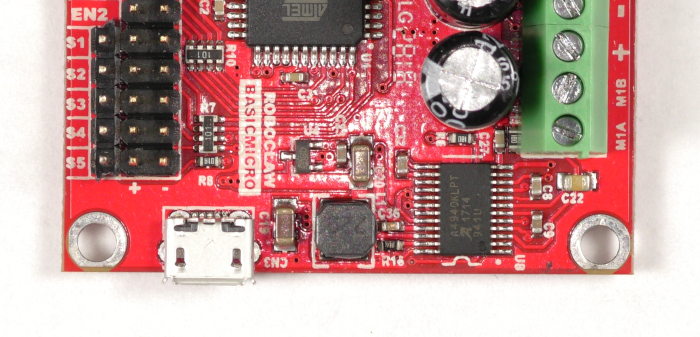
Figure 5: Micro USB connector.
Features
Control Modes
The RoboClaw has several different control modes that are suitable for a wide range of projects. In RC mode the RoboClaw can be controlled via an RC radio system or a microcontroller emulating one. Analog mode allows for the use of potentiometers or joysticks as a control input. Packet serial mode allows two way communication with a microcontroller for both control and feedback. Finally, simple serial mode allows a microcontroller to send simple byte commands to the board for control of both motor channels.
Safety
The RoboClaw has several features to protect itself. Current limiting is automatic and the setpoint for current limiting can be set by the user in Motion Studio. The RoboClaw also has automatic temperature protection with preset setpoints. In the case of both types of protection the board will take the appropriate action to prevent damage to itself.
Encoders
RoboClaw can be used with both absolute and quadrature encoders and supports a decoding rate of up to 19.9 million pulses per second. Encoders allow the RoboClaw to precisely control both the speed and position of both motor channels.
PID Control
RoboClaw can use what is known as PID control when it controls the speed and direction of motors attached to it. It allows the RoboClaw to maintain speed and position properly even when there are load changes to a motor. The P, I and D parameters can be automatically set by the tuning system in Motion Studio or be manual set by the user.
Basics of using the RoboClaw board
Power
Power connections are made at the large terminals labeled (+) and (-). A battery is the recommended power source for all RoboClaw boards as switch mode and linear power supplies don’t tolerate the regenerative voltage from the RoboClaw well. Wiring the RoboClaw power backwards will result in damage to the board. See this App Note for information on proper wire termination. See the user manual for a guide to using power supplies with RoboClaw.
USB Connection
The USB connector on the RoboClaw is a micro sized USB connector and is used when connecting the RoboClaw to a computer for use with Motion Studio. The RoboClaw does not power itself from the USB connection and always requires an external power source to operate.
Pin headers
The pin headers on the RoboClaw are 0.1″ pitch and work with any connector suited to that pitch. Commonly used connectors for the RoboClaw are RC servo connectors and DuPont jumper wires. Always note the polarity marked on the board for each header.
Power (BEC) and ground
The RoboClaw has an on-board BEC which is a voltage regulator that supplies a 5VDC source of power that is used by the RoboClaw and can also be used to power microcontrollers, RC receivers and encoders. The 5VDC source is available at any of the positive pins on the pin headers except for the logic battery input header. Similarly the ground pin on any of the headers, besides the LB in headers, can be used as a common ground for devices connected to the RoboClaw. See this App Note for more details about the RoboClaw’s BEC.
Encoders
Encoders are connected to the ENC1 and ENC2 headers on the RoboClaw. If you are using quadrature encoders be sure that the leading channel is attached to the pin closest to the boards edge. When using analog encoders or absolute encoders the connect the output of the encoder to the pin closest to the board edge. After wiring your encoders you can check the operation of them in Motion Studio. There you can ensure that the pulses are being counted properly and that the motion of the motor corresponds to the encoder counting.
Precautions
As stated earlier do not hookup the RoboClaw’s power terminals in reverse, permanent damage will result. Also, when removing power from a RoboClaw always disconnect the positive lead before the negative lead.
Do not disconnect any motors from the RoboClaw while it is powered as damage is a likely result. Always make sure that the motors are stopped before powering down the RoboClaw. Voltage generated by rotating motors can power the RoboClaw when it is off and cause it to operate erratically.
If you are trying to operate the RoboClaw in bridged mode you must configure it in Motion Studio before wiring the motor or else the board may be damaged.
Limitations
Each RoboClaw has voltage limitations, including minimum and maximum voltages. This is the case for both the main battery as well as the logic battery. User-defined minimum and maximum voltage can also be set for the RoboClaw via Motion Studio.
| RoboClaw Model | Minimum Battery Voltage | Maximum Battery Voltage |
| RoboClaw Solo 30A | 6V | 34V |
| RoboClaw Solo 60A | 6V | 34V |
| RoboClaw 2x7A | 6V | 34V |
| RoboClaw 2x15A | 6V | 34V |
| RoboCLaw 2x30A | 6V | 34V |
| RoboClaw 2x45A | 6V | 34V |
| RoboClaw 2x60A | 6V | 34V |
| RoboClaw 2x60AHV 60VDC | 6V | 60V |
| RoboClaw 2x60AHV 80VDC | 6V | 80V |
| RoboClaw 2x120A 60VDC | 10V | 60V |
| RoboClaw 2x160A | 10V | 34V |
| RoboClaw 2x160A 60VDC | 10V | 60V |
| RoboClaw 2x200AHV 60VDC | 10V | 60V |
There are also current limitations for each model of RoboClaw. Each model has a maximum constant current limit and a higher peak current limit that can be maintained for a short period of time. User-defined current limits can also be set via Motion Studio.
| RoboClaw Model | Constant Current Limit | Peak Current Limit |
| RoboClaw Solo 30A | 30A | 45A |
| RoboClaw Solo 60A | 60A | 100A |
| RoboClaw 2x7A | 7A | 15V |
| RoboClaw 2x15A | 15A | 30A |
| RoboCLaw 2x30A | 30A | 60A |
| RoboClaw 2x45A | 45A | 60A |
| RoboClaw 2x60A | 60A | 120A |
| RoboClaw 2x60AHV 60VDC | 60A | 120A |
| RoboClaw 2x60AHV 80VDC | 60A | 120A |
| RoboClaw 2x120A 60VDC | 90A | 120A |
| RoboClaw 2x160A | 120A | 160A |
| RoboClaw 2x160A 60VDC | 120A | 160A |
| RoboClaw 2x200AHV 60VDC | 160A | 200A |
Every RoboClaw has predefined limits for temperature to prevent damage to the board. At 85C RoboClaw will throw a warning and at 100C will throw a fault. If a RoboClaw has a fan installed it will turn on at 45C and turn off at 35C.