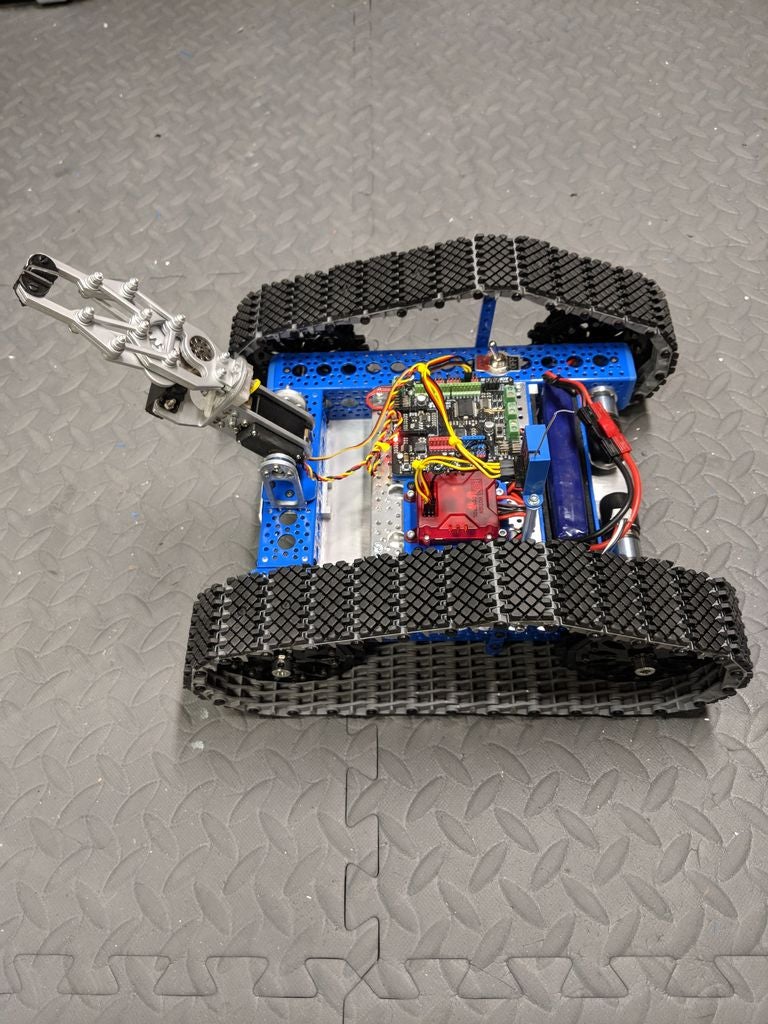
Figure 1: The completed Trackbot Mk V.
An Instructables user by the name of kwoeltje has posted his build of a tracked robot built using a RoboClaw motor controller. The builder calls his creation “Trackbot Mk V”. The chassis of the robot is built from Actobotics channel. Custom metal as well as 3d printed parts bind all of the components together. The tracks are off the shelf components from LynxMotion and are driven by a pair of 98 rpm brushed DC motors from ServoCity. The pair of motors is controlled by a RoboClaw 2x7A motor controller. The RoboClaw is used in it’s RC mode so that the robot can be driven around with an RC transmitter.
At the front of the Trackbot is a user-controllable robotic arm. The arm is driven by a DFRobot Romeo microcontroller that takes input from the RC receiver. Internally the claw uses Hitec servos.
Power for the the whole robot comes from a large 3-cell lithium polymer battery. A step-down converter is used to bring the battery voltage (11.1 V) down to the voltage required for the electronic components of the robot. The step-down converter used features a large display that indicates the voltage set by the converter.
We thank kwoeltje for posting the details of his build and are pleased he chose to use our RoboClaw motor controller. For the full detailed build guide and more photos please follow this link to Instructables.
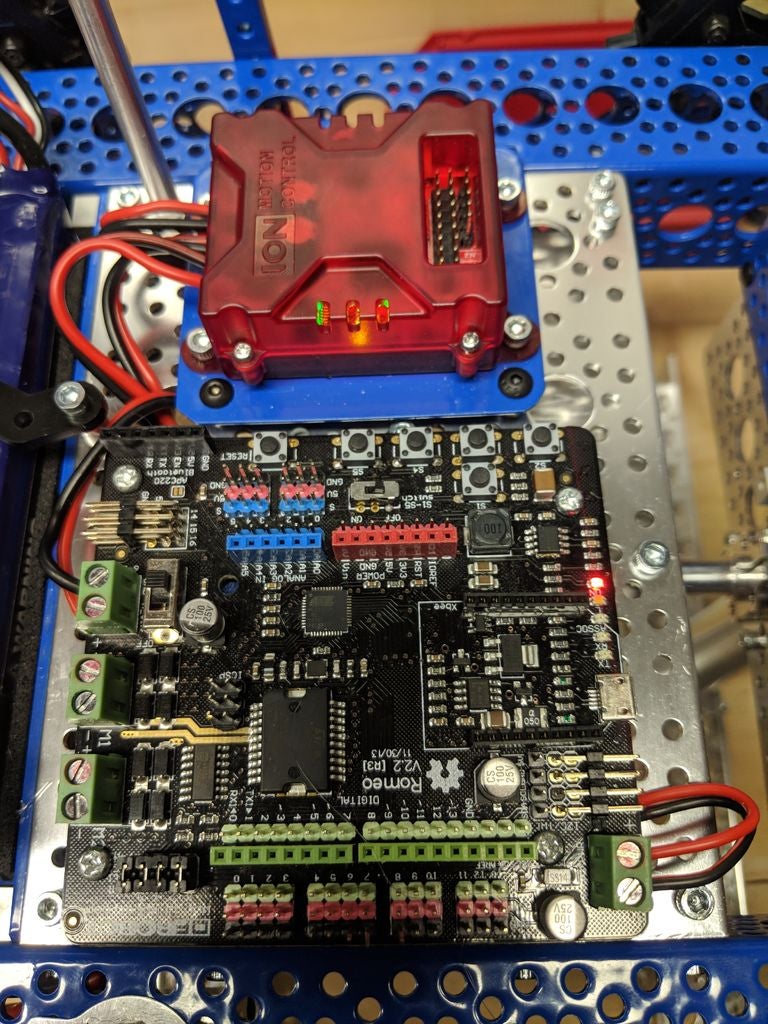
Figure 2: The RoboClaw 2x7A motor controller in a case alongside the microcontroller.