
The RoboClaw is a rather sophisticated motor controller with a wide range of features and functionality. This Application Note will be a broad overview of the board, its features and tips on its usage.
The RoboClaw is a rather sophisticated motor controller with a wide range of features and functionality. This Application Note will be a broad overview of the board, its features and tips on its usage.
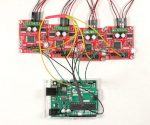
Some robotics projects will require the use of more than one motor controller at a time. RoboClaw supports this type of operation and it’s straightforward to configure and wire.

Some robotic projects make use of more than one motor controller. The RoboClaw is engineered to be used in this fashion with the use of a microcontroller like an Arduino.

The RoboClaw has several useful control methods, one of them being analog control. With analog control you can use a variety of user interface options so long as they output an appropriate analog voltage. In this Application Note we’ll be using an analog joystick to control two motors with the RoboClaw in analog mode.

Motor controller like the RoboClaw used feedback from sensors like encoders to maintain the speed and position of motors. Internally, a system called a PID controller is used to maintain these values at their given setpoints. In this App Note we’ll be looking at the what, why and how of a PID controller.