
The poular esp8266 wifi board can be used to wirelessly control a RoboClaw motor controller. This App Note provides example code and covers configuring everything needed.

Teensy Packet Serial Control of RoboClaw
This Application Note details how to use a Teensy microcontroller to control a RoboClaw in packet serial mode.

Teensy Simple Serial Control of RoboClaw
In this Application Notes a Teensy microcontroller is used to control a RoboClaw motor controller in simple serial mode.

RoboClaw Packet Serial with the Pololu A-Star 32U4
The Pololu A-Star microcontroller’s serial functionality can be used to control a RoboClaw motor controller. This Application Note covers the details.
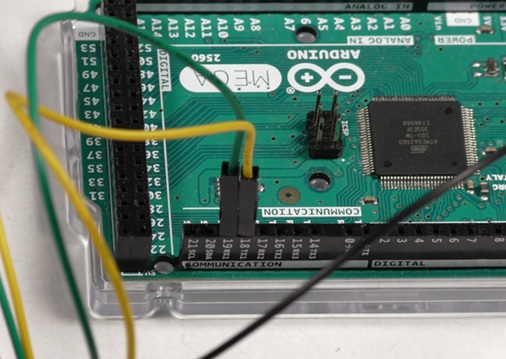
Using Hardware Serial with the RoboClaw Arduino Library
When using serial communication with an Arduino there are two implementations available. This application note covers using hardware serial with the Basicmicro Arduino library to communicate with a RoboClaw, and why it is usually the better choice.

Using the RoboClaw Arduino Library
The RoboClaw Arduino library is now the Basicmicro Arduino library, available in the Arduino Library Manager. This article covers installing the library, the pattern every sketch follows, and the most commonly used functions for controlling RoboClaw and MCP motor controllers.

Standard Serial Mode with Arduino
Control a RoboClaw motor controller from an Arduino using standard serial (Simple Serial) mode: wiring, Motion Studio configuration, and a complete example sketch that drives both motor channels with single-byte commands.

Simple Arduino Control of the RoboClaw
How to control a RoboClaw motor controller from an Arduino over packet serial: wiring, Motion Studio configuration, and an example sketch using the Basicmicro Arduino library.